
|
|

|
|
|
|
|
| A | B | C |
| One | Two | Three | Four |
Zumo is our first line following robot. I plan to start out using Pololu example code and end up with a loop proof line follower. Then build a micromouse type from scratch using Pololu gearmotors w encoders, Arduino Uno, Line Follow IR array.
|
|
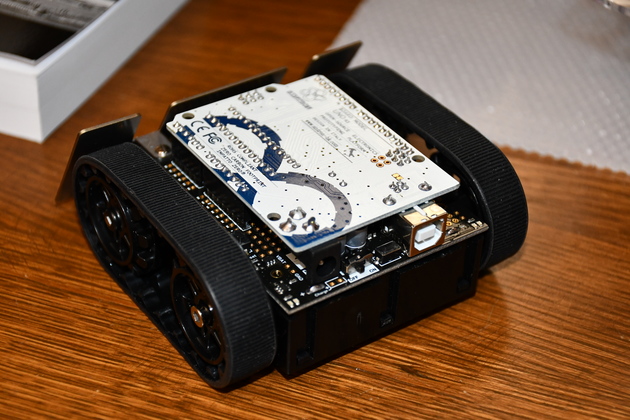
Zumo right after assembly. |
|
|
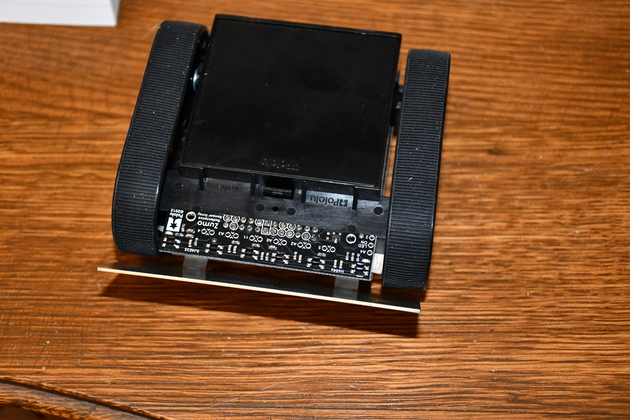
Like a puppy, on it's back wanting a belly rub. You can see the sensor array. |
|
From the rear. |
|
|
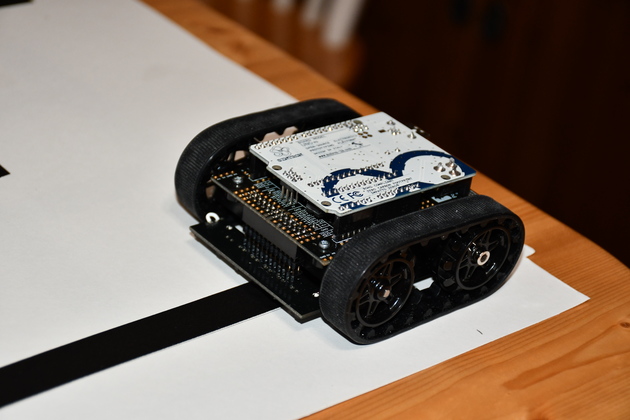
Zumo likes this line maze. The first maze I made too small, Zumo would get confused. |
|
Ready to "Charge". |

|
|